Using fish to teach underwater robots to swim
Underwater vehicles are used in environmental monitoring, resource exploration, offshore infrastructure construction and maintenance, maritime security, and search and rescue. Whether remotely-operated or truly autonomous, their movement through water cannot compare to the efficiency and precision of those that have adapted over millennia to their aquatic environment, such as fish.
Creating more efficient ‘swimming’ vehicles is one challenge, but optimising patterns of movement to suit changing marine conditions is an even bigger challenge. It takes a supercomputer to achieve what fish do naturally.
The Challenge
Fish have evolved a range of swimming modes to propel themselves efficiently through water, and adapt their swimming behaviour in different environments (steady currents, turbulent flow, vortices forming around obstacles, and the local flows generated within shoals of fish themselves) and to achieve different goals (obtaining food, escaping from predators, migrating). They can transition dynamically between swimming styles or gaits rapidly to increase speed, change direction or save energy.
Fish movement has been studied for a long time to improve the design concepts and locomotion control strategies for man-made submersible vehicles. Dr Fangbao Tian, from the School of Engineering and Information Technology at the University of New South Wales, Canberra, has been using computational fluid dynamics techniques to understand how fish can optimise their movement in different flow conditions. “Modelling how fish swim is very challenging,” Dr Tian explains. “Understanding the flow–structure interactions, when the structure itself – the fish – is moving, requires novel Cartesian mesh-based methods to compute the continually changing boundary conditions at that moving interface.”
It’s like mapping how a robot ‘dog’ moves over an uneven surface. Except the shape of the surface is changing, and the shape of the dog is changing too.
But building a numerical simulation that can move like a fish in a defined flow is just the start of the problem. Dr Tian is now combining these models with AI learning techniques to see how they can adapt their movement to changing flow conditions, or changing goals.
The Solution
“We initially had to develop our own computational fluid dynamics solvers to simulate the flow conditions and the fish movement, because the computational efficiency of the existing solvers for this type of problem was very low. It requires supercomputing, and we need to obtain the fluid dynamics in a reasonable time if we want to combine multiple movements with learning methods to see if the simulation can learn and optimise its behaviour to the conditions,” says Dr Tian.
Using Pawsey’s supercomputing facilities, Dr Tian is now using reinforcement learning algorithms to train neural networks using the computational fluid dynamics simulations. Through sampling information about the flow field around the swimming model, using trial and error, and remembering the outcomes of historical actions, the model can be trained to achieve a specific goal.
“It takes a lot of computation to build up and explore a database of many different actions in many different flow conditions for the model to learn from,” says Dr Tian. “Using Pawsey we can explore 4,000–5,000 episodes of a particular scenario, which takes about two weeks using around 300 cores.”
Outcome
Dr Tian’s models have been learning how to swim point-to-point in a steady flow, hold their position in an oncoming current, and hold their position in the regular vortex ‘street’ that forms behind a cylindrical obstruction. Whereas real fish can adjust their swimming behaviour to these sorts of conditions within three or four beats of their tail, after training, the models can optimise their swimming motion to the conditions within about 20 tail beats.
“We can’t match thousands of years of evolution yet, but we’re getting closer,” says Dr Tian. “The ultimate aim is to use the understanding we’re gaining of the flow physics and the movement control strategies to design underwater robots with improved locomotion, manoeuvring and holding capabilities in real marine environments.”
Project Leader.
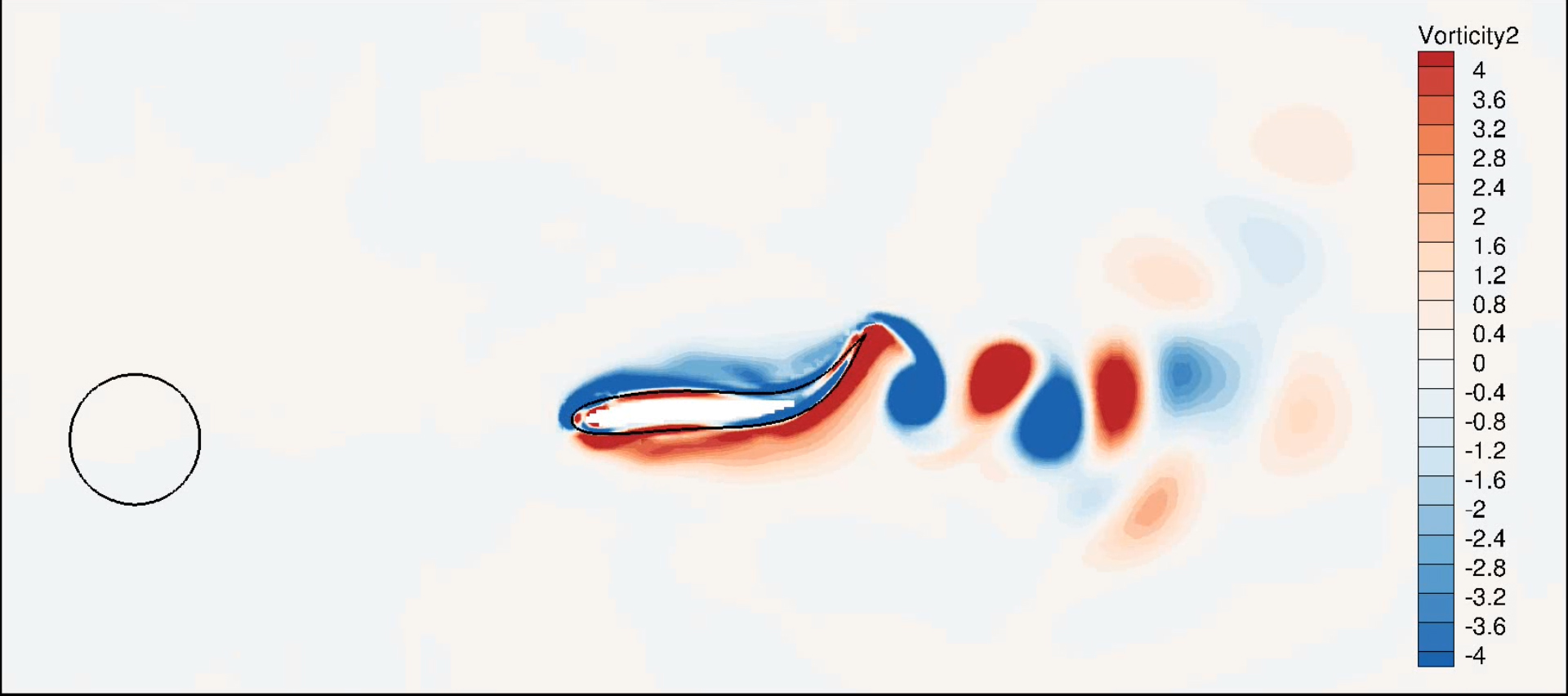
Visualisation fish point-to-point swimming in a steady flow
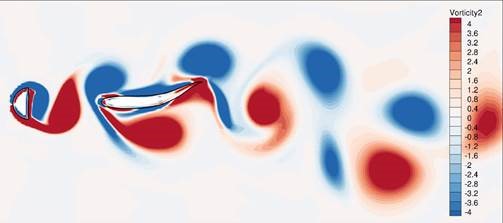
Karman gaiting into the vortex street forming behind a hemicylinder