Computing of deformations and forces due to needle insertion into soft organs
The project seeks to accuretaly predict organ deformations and intraoperative position of surgical target duirng needle insertion without patient-specific information about the tissue mechanical properties and within the real-time constraints of image-guided surgery. The predictions are to be used in surgical robot control loop.

Area of science
Biomedical Engineering
Systems used
Nimbus
Applications used
Inhouse code (programming language Julia)The Challenge
Real-time (within the real-time constraints of image guided surgery) prediction of organ deformation and surgical target position during needle insertion. The intended task associated with the use of Pawsey facilities was to obtain information about the computation time required for such prediction in various needle insertion scenarios.
The Solution
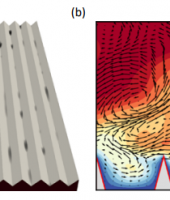
Parallel (multicore) software implementation of meshless (Galerkin-type) algorithm of computational mechanics (that uses computational grids in a form of cloud of points) for computing tissue deformations and kinematic algorithm (that directly links the tissue deformation to the needle movement) for modelling of interactions between the needle and sift tissues.
The Outcome
The intention was to use multicore capabilities and relatively large internal memory (33 GB) of Pawsey’s Nimbus to conduct computer simulations to investigate the performance of the created algorithms for modelling and simulation of needle insertion in various (different organs, different insertion depths) insertion scenarios.