Particle-Filtering
The project aims to make inference for stochastic process models with partly observed data.

Area of science
Statistics
Systems used
Nimbus
Applications used
docker, Python, RThe Challenge
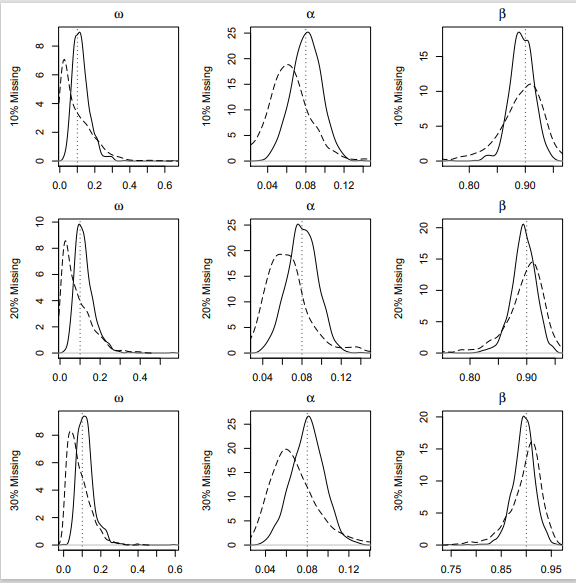
With incompletely observed data, the likelihood of the model becomes analytically intractable, and its evaluation is is different, making likelihood based inference for such model very challenging.
The Solution
We formulate the problem using state space models and use the particle method to approximate the value of the likelihood.
The Outcome
The Pawsey center’s resources and the NCI facilities in general have allowed us to implement the computationally intensive algorithms used for teaching and research in this area. This web app for teaching and illustration of MCMC algorithms relies on the Pawsey resources: http://146.118.67.124/math5835/MC/
List of Publications
Wee, DCH, Chen F, Dunsmuir, W, “Estimating GARCH(1,1) in the presence of missing or aggregated observations”, manuscript in submission/revision.